-

-

- Мои разделы
-
 Мои друзья(0)
Мои друзья(0) -
Мои фото(0)
-
Мои дневники(0)
-
Моя музыка(0)
- Разделы сайта
- Раздел сервисы и загрузок 14
- Раздел развлечения 18
- Раздел онлайн игр 76
- ✴Банды сайта❗✴ (1/3)
- ⭐Лидеры дня❗⭐ (0)
- ☀День рождения❗☀
- ☀Новости сайта❗☀ (21)
- ⭐Топ пользователей❗⭐
- ❤Даты праздников❗❤ 255/152
- ⭐Фотогалерея сайта❗⭐ (107)
- ☀Статусы обитателей ❗☀ (19)
- ❤Дневники сайта❗❤ (1)
- Микроблоги 6
- ❇Форум сайта❗❇ (55/90)
- ⭐Файловый обменник❗⭐ (3)
- ✴Анаграмма❗✴ 0 человек
- ☀Администрация сайта❗☀ (1)
- ✳Викторина❗✳ 0 человек
- ☀Чат сайта❗☀ (0 человек)
- ❤Бракосочетания❗❤ (2 )
- ❤Война полов❤
- ❤VIP Знакомства❤ 264
- ❤Обитатели сайта❗❤ М :136 | Ж :128
- ☀Острослов☀
- Сказочный бонус (83)
- ✴Ежедневный подарок❗✴ (27)
- Аукцион Джинов
- Зарница (3)
- ❤Лотерея❤
- Спортлото 6 из 36
- Русская рулетка (35)
- Моя удача
- Дополнительно
-
Выход
 Получить зарплату💸💰💳
Получить зарплату💸💰💳
 Банк сайта
Банк сайта💌mirsoc.ru
По ловкости рук американский робот превзошел человека
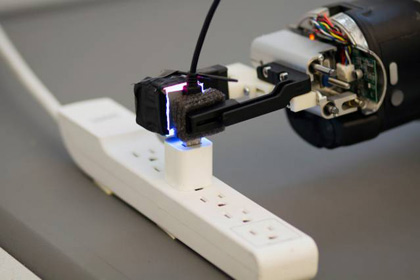
Американские ученые оснастили робота датчиком осязания нового типа — благодаря нему машина смогла схватить свободно висевший в воздухе USB-кабель и вставить его в USB-порт, сообщается на сайте Массачусетского технологического института. Новый датчик был продемонстрирован на Международной конференции по «умным» роботам и системам, которая прошла 14-18 сентября в Чикаго..
Промышленные робота способны на высокую точность в работе с объектами, чье местоположение зафиксировано заранее. Однако манипуляция со свободно висящими объектами является чем-то беспрецедентным, утверждают авторы изобретения. Схватить и вставить USB-кабель удалось благодаря датчику GelSight, установленному на захватное устройство робота.
Большинство датчиков осязания рассчитывают механические силы по механическим же измерениям, однако GelSight использует оптику и алгоритмы распознавания образов. Иными словами, тактильный сигнал сначала преобразуется в визуальный – и «мозг» робота работает уже с последним.
Датчик GelSight представляет собой блок прозрачной, синтетической резины, покрытой с одной стороны металлизированной краской. Резина деформируется под воздействием объекта, с которым соприкасается, а краска выравнивает светоотражающие свойства материалов, облегчая осуществление точных оптических измерений.
В новой модификации датчика датчик устанавливается в пластмассовый кубик, стенки которого пропускают свет разного цвета (красный, зеленый, синий, белый) – свет этот излучают светодиоды, расположенные на противоположном конце кубика. Когда резиновый слой, покрывающий одну из граней кубика, подвергается деформации, свет отскакивает от металлизированной краски, и его «ловит» камера, установленная там же, где и диоды.
По перепадам в интенсивности света различных цветов, новый алгоритм воссоздает трехмерную структуру складок и углублений на поверхности, с которой соприкасается датчик. Даже небольшое устройство с низким разрешением, установленное на манипуляторе робота, примерно в 100 раз более чувствительно, чем палец человека (последний может на ощупь отделить один бугорок от другого, если расстояние между ними составляет не меньше миллиметра).
